Amikor a túl sok robot bajt okoz
Hiába tűnik jó ötletnek, ha egy nagyobb feladathoz egyre több robotot állítunk csatasorba – egy bizonyos határon túl a zsúfoltság miatt a hatékonyság visszaesik. Például ha olajszennyezést akarunk megszüntetni, vagy egy MI-vezérelt robotcsapat bonyolult gépet szerel, hamar eljön az a pont, amikor a robotok csak akadályozzák egymást. A Harvard kutatócsoportja ezért arra keresett választ, hol van ez a fordulópont, és hogyan lehetne a problémát kiküszöbölni.
A véletlenszerű mozgás ereje
Az alkalmazott matematika professzora, L. Mahadevan laborjának friss kutatása azt mutatja, hogy nem mindig a katonás rend teremti meg az optimális működést: némi irányított káosz, vagyis véletlenszerű eltérés a robotok mozgásában, feloldhatja a dugulásokat. A kutatás során matematikai modelleket, számítógépes szimulációkat és valós teszteket is végeztek. Kimutatták, hogy az egyszerű, helyi mozgásszabályok képesek nagyléptékű, jól szervezett folyamatokat eredményezni – akár robotok, akár emberek tömegéről van szó.
Miért pont a véletlen segít?
A sűrű tömeg mozgásának leírása nehéz, hiszen szinte végtelen lehetőség közül választhat minden robot. A Harvard kutatócsoportja ezért minden robotot egyszerű egységnek tekintett, amely kis mértékben eltérhet a kijelölt útjától. Ha minden robot szigorúan egyenes vonalban halad, hamar kialakulnak a torlódások. Ezzel szemben, ha túl nagy a mozgásukban a véletlen, minden robot összevissza tévelyeg, így a teljesítmény is csökken. A kettő között található a „jól eltalált” tartomány, ahol a robotok néha ugyan összeakadnak, de mégis képesek kikerülni egymást, így folyamatos marad az áramlás.
Valóság vs. szimulációk
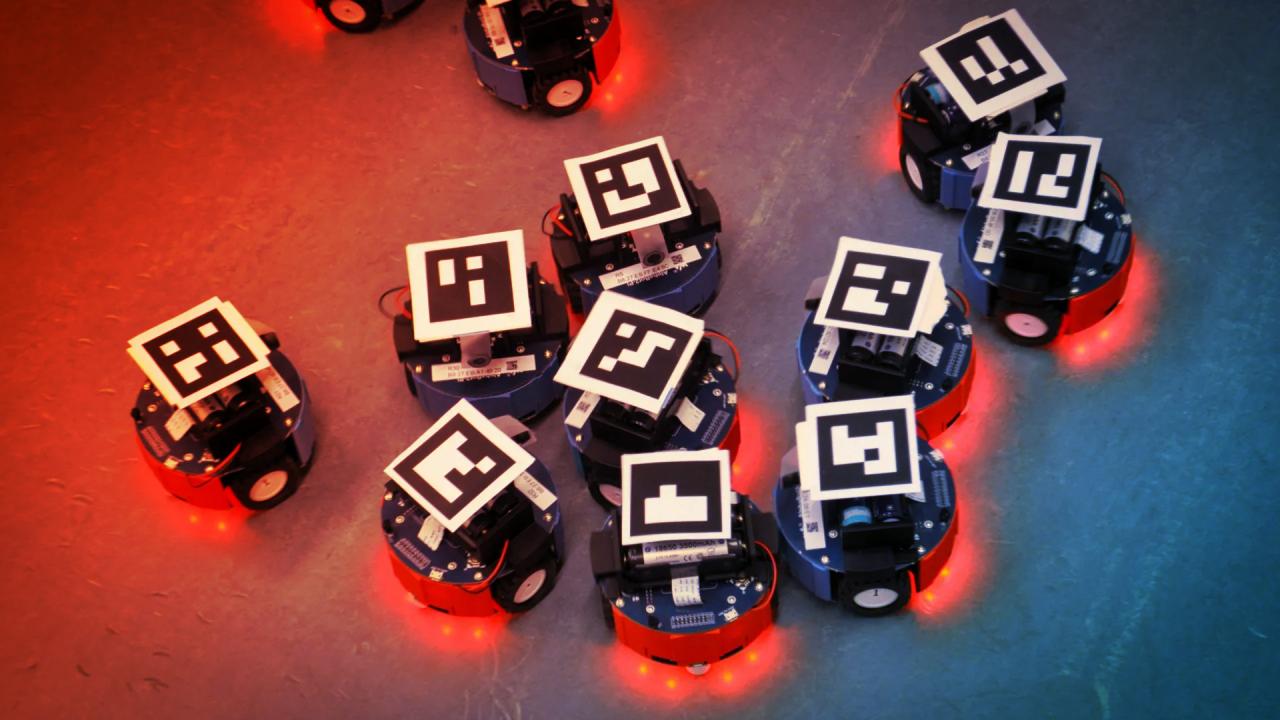
A szimulációkból kiindulva a csapat matematikai képleteket alkotott, hogy megjósolja, adott sűrűség és a mozgás véletlenszerűségének mértéke mellett hány feladatot tudnak végrehajtani a robotok. Emellett kísérleteztek az eindhoveni fizikussal, Federico Toschival is: laboratóriumban guruló robotokat figyeltek meg, amelyek mozgását QR-kódos azonosítók és egy kamera követte. Noha ezek a robotok nem voltak olyan gyorsak és pontosak, mint az MI-szimuláció, mégis ugyanazokat a viselkedésmintákat mutatták.
Egyszerű szabályok, bonyolult rendszerek
A vizsgálat rámutatott, hogy nem feltétlenül kell bonyolult MI vagy központi vezérlés a sikeres csoportmunkához – elég néhány helyi szabály. Az önszerveződő, zsúfolt rendszerek nemcsak a robotikában jöhetnek jól, hanem állatcsordák mozgásának, vagy akár városi tömegek viselkedésének megértésében is. Mahadevan szerint a módszer alkalmazható lehet viselkedésökológiai, közlekedési vagy városirányítási feladatokban is.
A jövő mozgó tömegei
Lucy Liu, a tanulmány vezetője szerint a kutatás nagy lépés a biztonságosabb és hatékonyabb tömegirányítás felé. A felismerés, hogy a kontrollált véletlenszerűség javítja a folyamatokat, hasznos lehet gyárakban, közutakon vagy akár városi csomópontokon is.
A legfőbb tanulságok
A Harvard kutatásai azt mutatják, hogy ha zsúfolt térben dolgozik sok robot, egy kis véletlenszerűség bevezetése jelentős hatékonyságnövekedést okozhat. Az egyszerű, helyben alkalmazott szabályok meglepően bonyolult és jól összehangolt viselkedést válthatnak ki, központi MI nélkül is. Az elkészült matematikai modellek nemcsak a robotrajok tervezését javíthatják, hanem a zsúfolt nagyvárosi, közlekedési vagy közterületi rendszerek optimalizálására is lehetőséget adnak.