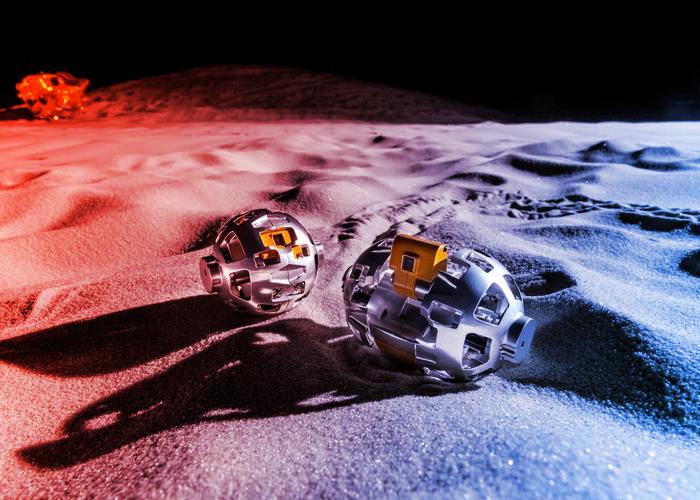
A japán holdrobot, amely történelmi fotót készített a felborult szondáról
A Hold felszínét bejáró intelligens japán robot 2024-ben száz percen át működött, miközben sorsdöntő fotókat készített arról, hogyan került oldalára, majd feje tetejére a leszállóegység. A golyóformájú eszköz teljesen önállóan kúszott a holdporban, és képeket sugárzott vissza a Földre – miközben a megfagyás szélén álló SLIM űrszonda már csak az utolsó tartalékaiból működött.
A kis gömb nagy dobása
A Palm-Sized Lunar Excursion Vehicle 2 (LEV-2) nevű robotlabda volt az egyik legizgalmasabb kiegészítő, amit a SLIM leszállóegység magával vitt a Holdra. Japán a SLIM sikeres landolásával, 2024. január 19-én, ötödikként ért el a Holdat, ám megváltozott a helyzet, amikor a napelemek nem töltötték az akkumulátort. A maradék energiát ezért két rover telepítésére fordították: az alakváltó, két keréken guruló LEV-2-re és a pattogó LEV-1-re.
A mindössze 95 grammos, baseball-labda méretű robottal sorra érkeztek a mellbevágó képek: kiderült, hogy a SLIM az oldalára, majd fejjel lefelé dőlt, és napelemei árnyékban maradtak. Külön figyelmet érdemel, hogy a LEV-2 sikeresen megkerülte a fő leszállóegységet, és hatékonyan továbbította a holdfelszíni környezet fotóit. Nem egyértelmű, de lehetséges, hogy mindez a későbbi hibafeltárást, az űrszonda sorsának rekonstruálását is jelentősen segítette.
Mi várható a minirobotoktól?
Az alakváltó kis robot bizonyította, hogy képes eligazodni ismeretlen környezetben: fejlett mobilitása és képfeldolgozó rendszere révén egyedül navigált, sőt, egy percnél rövidebb időközönként küldött információkat a reléjeként szolgáló LEV-1 révén. Ennek ellenére kihívások is akadtak: az adatküldés gyakorisága kevésnek bizonyult, és a kommunikációs kapcsolatok is többször megszakadtak. A szoftver is egyszerű volt, kevesebb hibakezelő funkcióval, mint amire hosszabb űrmisszió során szükség lehetne.
Továbbfejlesztett holdkutatók kora
A tapasztalatok azt mutatják, hogy a jövőben a rugalmasabb, nagy számban bevethető minirobot-flották lehetnek a Naprendszer felderítésének kulcsai. Ezek olcsóbbak, strapabíróbbak és könnyebben alkalmazkodnak a váratlan helyzetekhez, mint a korábbi generációk nagyméretű leszállóegységei. A fejlesztők már azt tervezik, hogy sűrűbb állapotfrissítéssel, stabilabb kommunikációval és bővíthető szoftverrel vértezik fel a következő holdjárókat – így minden eddiginél többet megtudhatunk az égitestekről.
📱 A Google ismét újat mutat a Pixel okostelefonok világában – mostantól az eszközökön futó mesterséges intelligencia még erősebbé teszi a mobilokat, úgy, hogy közben védi a felhasználók adatait...
Fizetős iOS appok és játékok, amik ingyenesek a mai napon. Between Dates Calendar Math (iPhone/iPad)A Between Days alkalmazás egyszerű és gyors megoldást kínál két dátum közötti napok kiszámítására...
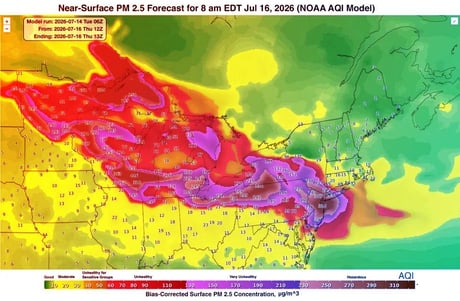
Az Észak-Minnesotában pusztító erdőtüzek füstje hamarosan elérheti az Egyesült Államok északkeleti nagyvárosait, többek között Detroitot, Milwaukee-t, Clevelandet, Philadelphiát és New Yorkot...
A Minnesotai Egyetem laboratóriumában újszerű biológiai eredmény született: egy aprócska SpudCell nevű képződmény képes táplálkozni, növekedni, versengeni, osztódni és lemásolni önmagát – vagyis szinte mindent tud, amit egy élő sejt is...
A Google Képek (Google Images) megújult külsőt kapott: mostantól személyre szabott galériákat kínál a felhasználóknak, így még könnyebben fedezhetik fel az őket érdeklő képeket...
A Google DeepMind vezére, Demis Hassabis szerint az új generációs mesterséges intelligencia egyre komolyabb veszélyeket rejt magában, például a kiberbiztonság és a biológiai fenyegetések terén...
💊 Fontos kérdés, hogy meg lehet-e állítani vagy lassítani az Alzheimer-kór lefolyását, hiszen a demencia legfőbb oka, az Alzheimer-kór, világszerte rengeteg embert érint...
🚀 Sikeresen megérkezett kedden a Nemzetközi Űrállomásra egy amerikai–orosz személyzet, miután a kazahsztáni Bajkonurból indultak a Roszkoszmosz által üzemeltetett Szojuz MS-29 fedélzetén...
🔒 Az informatika egyik legfontosabb biztonsági eleme, a Secure Boot, már csaknem tíz éve lényegében védtelenné vált – és ezt eddig senki sem vette észre...
Bár a csípős paprika számos kultúra elválaszthatatlan része, és egyes laboratóriumi kísérletek a bennük található vegyületeket, például a kapszaicint gyulladáscsökkentőnek vagy akár daganatellenesnek mutatják, az utóbbi évek humán kutatásai nem ennyire egyértelműek...
Április 6-án négy űrhajós indult el az Artemis II misszió keretében az Orion űrhajóval, és körülbelül 40 percig teljesen eltűntek a Föld látóteréből...
💼 Májusban a Meta megvált dolgozóinak 10 százalékától, közel 8 000 alkalmazottat küldött el, ami jelentős átszervezéssel járt a vállalat MI-re és adatközpontokra irányuló fejlesztései miatt...
Időutazás egyetlen napon: Jeruzsálem falainak áttörésétől 🏰 a Rosetta-kő 🗿 megtalálásán és Napoleon 🚢 megadásán át a Grunwaldnál vívott döntő ütközetig ⚔️, sőt a modern korszakban a törökországi puccskísérletig 🇹🇷 és a Mozilla alapításáig 🦊...
Tipikus eset, amikor egy ismert gyógyszer egészen váratlan előnyöket kínál. A GLP-1 típusú szerek, mint az Ozempic, a Wegovy vagy a Rybelsus, eredetileg a fogyás, a jobb vércukorszint-szabályozás és a szívbetegségek kockázatának csökkentése miatt váltak népszerűvé...
Indiai kutatók a világ eddigi legrészletesebb, háromdimenziós agytörzs-atlaszát hozták létre, amelyben MRI-felvételeket több mint 500 mikroszkópos szövetrészlettel kapcsoltak össze...
Többek között különleges eredményre jutottak a kutatók: a Tejútrendszer középpontjához közel egy óriási gázfelhőben felfedeztek egy ritka cukorfélét, az eritrózt, amely nemcsak málnában, hanem barnító krémekben is megtalálható...
Ami kezdetben ártalmatlannak tűnt, most minden régi T-Mobile-előfizető számára valódi változás: a társaság e héttől kezdve automatikusan átsorolja a 10–15 éves tarifákat – például a Simple Choice, T-Mobile One, One Plus, a Magenta családhoz tartozó, valamint a Sprintből áthozott régi csomagokat – modernebb tarifákra...
A legnagyobb kriptovaluták teljesítménye az elmúlt 24 órában jelentősen visszaesett, miután egyre többen valószínűsítik, hogy az amerikai jegybank akár már júliusban kamatemelés mellett dönt...
🤔 A mesterséges intelligencia kutatása 75 éve követi Alan Turing útmutatását, aki két alapvető feltételezést tett: az intelligencia létrehozható szoftverből, függetlenül a testtől, és hogy egy gép intelligensnek számít, ha sikerrel utánozni tudja az embert, például egy beszélgetés során...